2D/3D data understanding
-
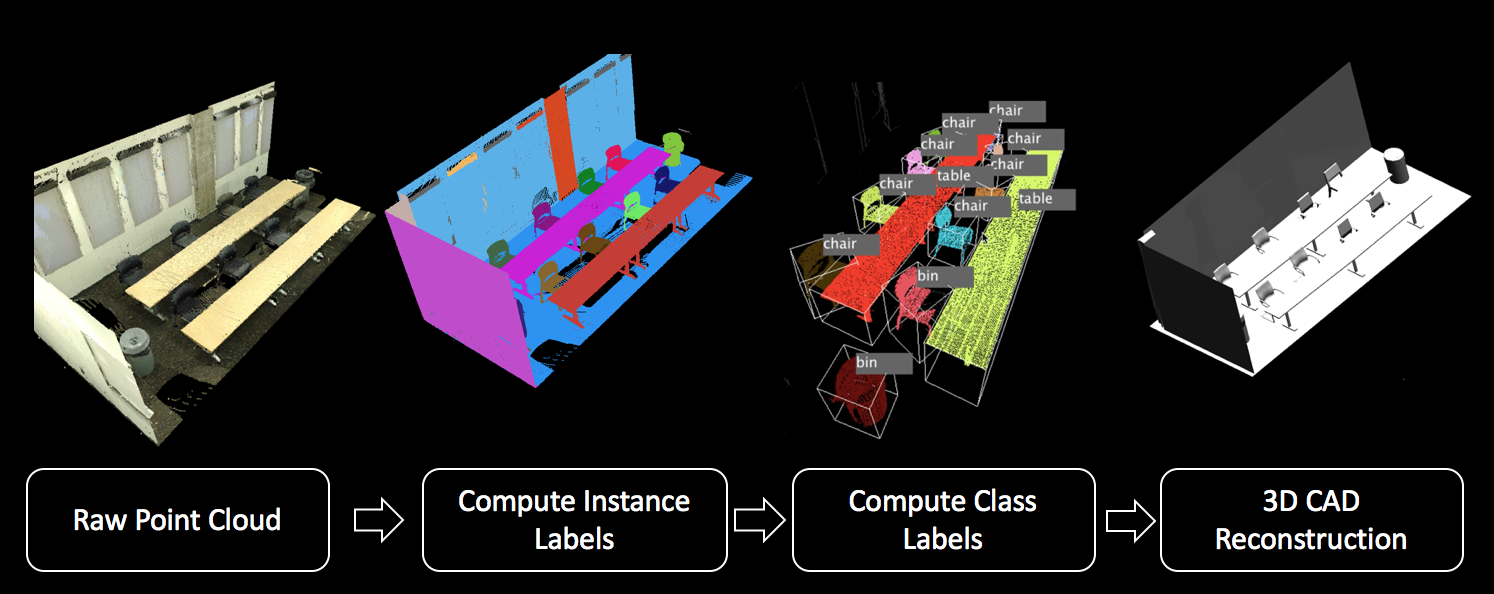
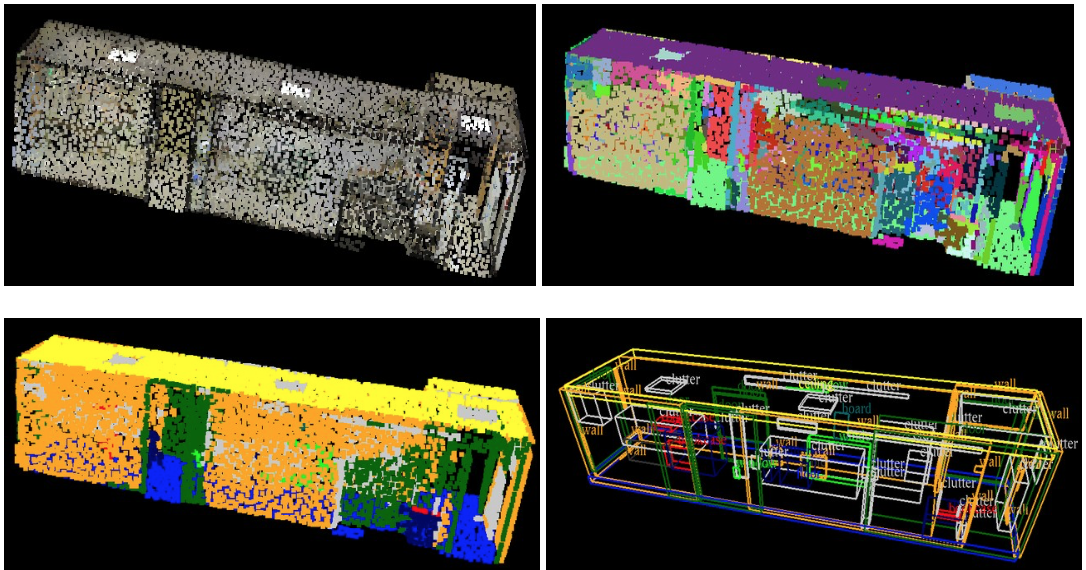
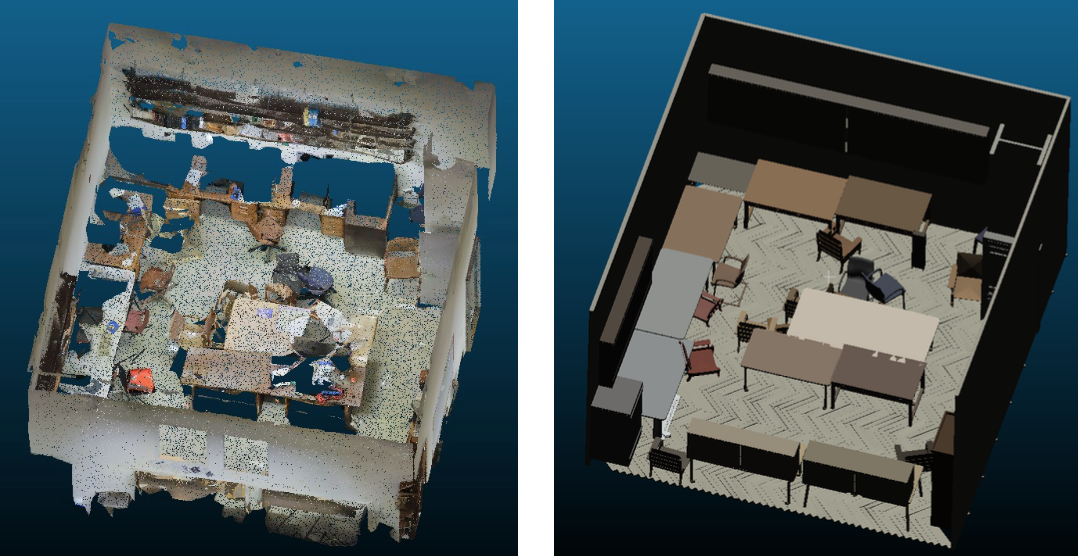
Chen, J., Kira, Z., and Cho, Y. (2019). "Deep Learning Approach to Point Cloud Scene Understanding for Automated Scan to 3D Reconstruction." ASCE Journal of Computing in Civil Engineering, 33(4) DOI:10.1061/(ASCE)CP.1943-5487.0000842, [Full Text]
-
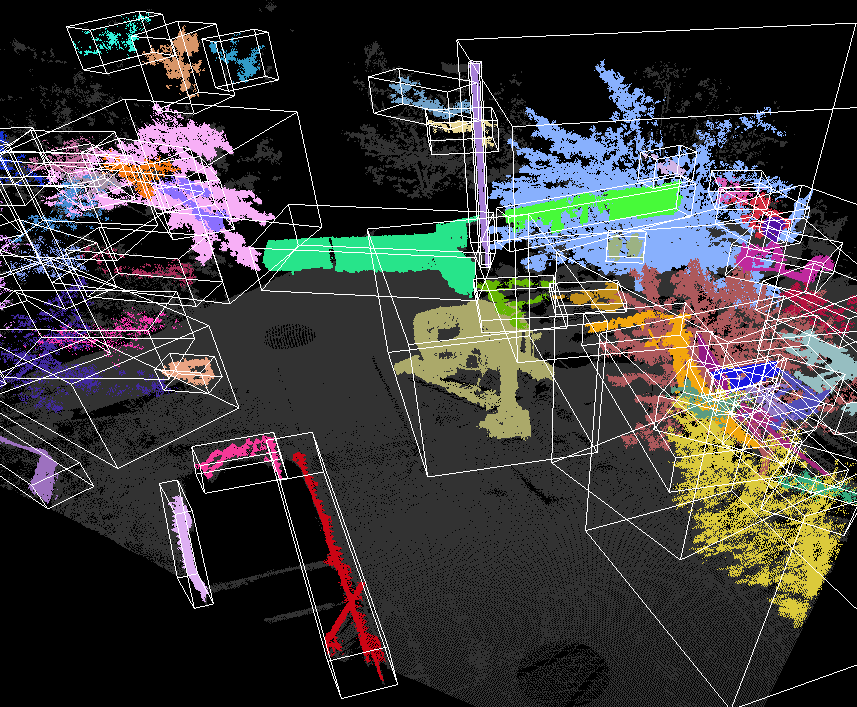
Chen, J., Cho, Y., and Kira, Z. (2019). "Multi-view Incremental Segmentation of 3D Point Clouds for Mobile Robots." IEEE Robotics and Automation Letters, 4(2), pp. 1240-1246,10.1109/LRA.2019.2894915, [Full Text]
-
Zeng, S., Chen, J., and Cho, Y.(2020). "User Exemplar-based Building Element Retrieval from Raw Point Clouds using Deep Point-level Features." Automation in Construction (in press),
-
Chen, J., and Cho, Y. (2019). "Exemplar-based Building Element Retrieval from Point Clouds." International Conference on Smart Infrastructure and Construction (ICSIC), Churchill College, Cambridge, UK, July 8-9; DOI: 10.1680/icsic.64669.225 [Full text]
-
Chen, J., Fang, Y., and Cho, Y. (2018). "Performance Evaluation of 3D Descriptors for Object Recognition in Construction Applications. Automation in Construction, Volume 86,February 2018, Pages 44-52, DOI: 10.1016/j.autcon.2017.10.033
-
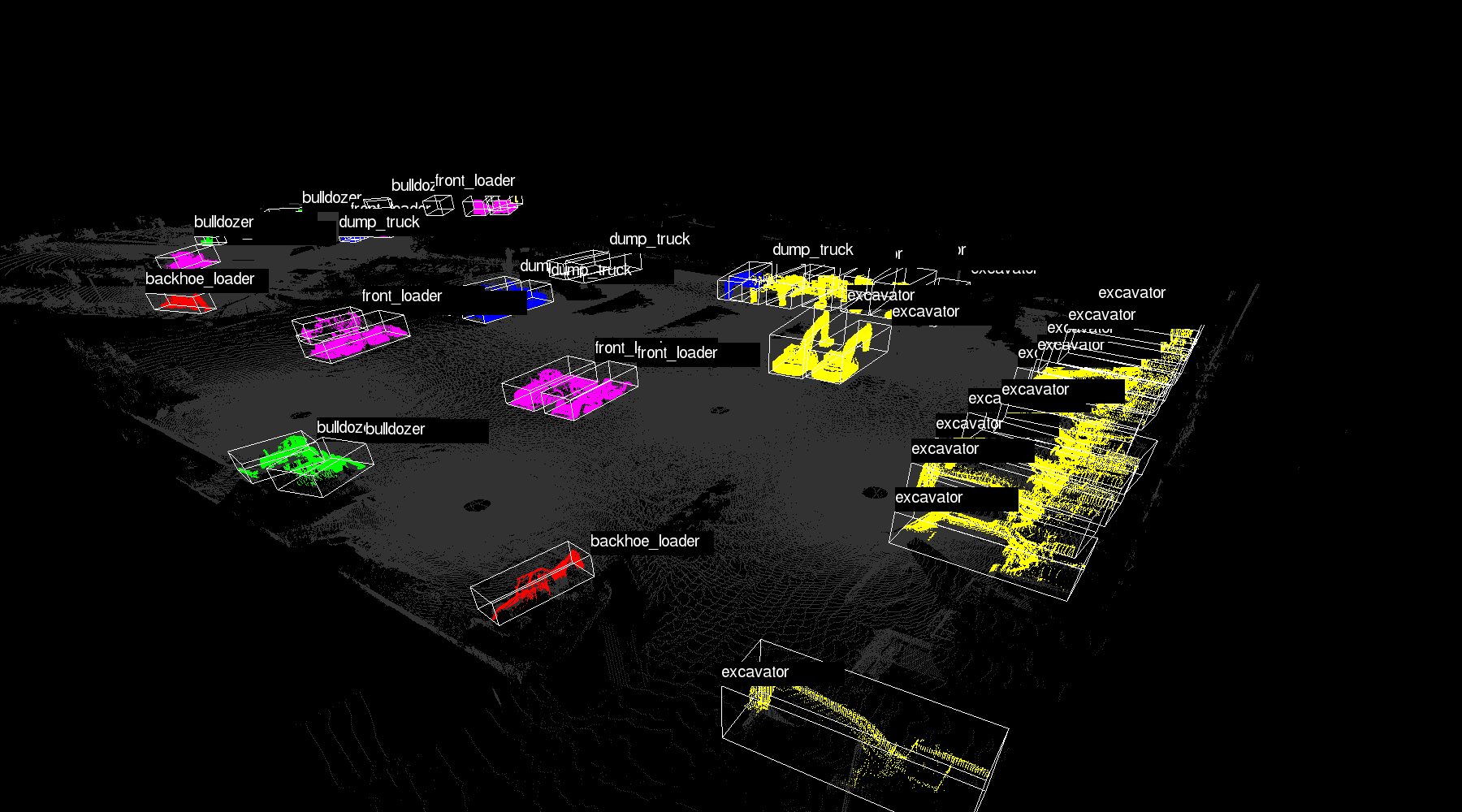
Chen, J., Fang, Y., Cho, Y., Kim, C. (2016). "Principal Axes Descriptor (PAD) for Automated Construction Equipment Classification from Point Clouds." ASCE's Journal of Computing in Civil Engineering, Volume 31, Issue 2, March 2017, doi.org/10.1061/(ASCE)CP.1943-5487.0000628 [Full text]
- Cho, Y. and Gai. M. (2014). “Projection-Recognition-Projection Method for Automatic Object Recognition and Registration for Dynamic Heavy Equipment Operations.” a special issue of ASCE Journal of Computing in Civil Engineering, Volume 28, Issue 5, September 2014, (invited from 2012 ASCE International Workshop on Computing in Civil Engineering in Clearwater Beach, FL) DOI: 10.1061/(ASCE) CP.1943-5487.0000332 [Full text]
-
Chen, J., Fang, Y., and Cho, Y. (2016). “Automated Equipment Recognition and Classification from Scattered Point Clouds for Construction Management. ” International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, July 18-21, 2016, DOI: 10.22260/ISARC2016/0027 [Full text]

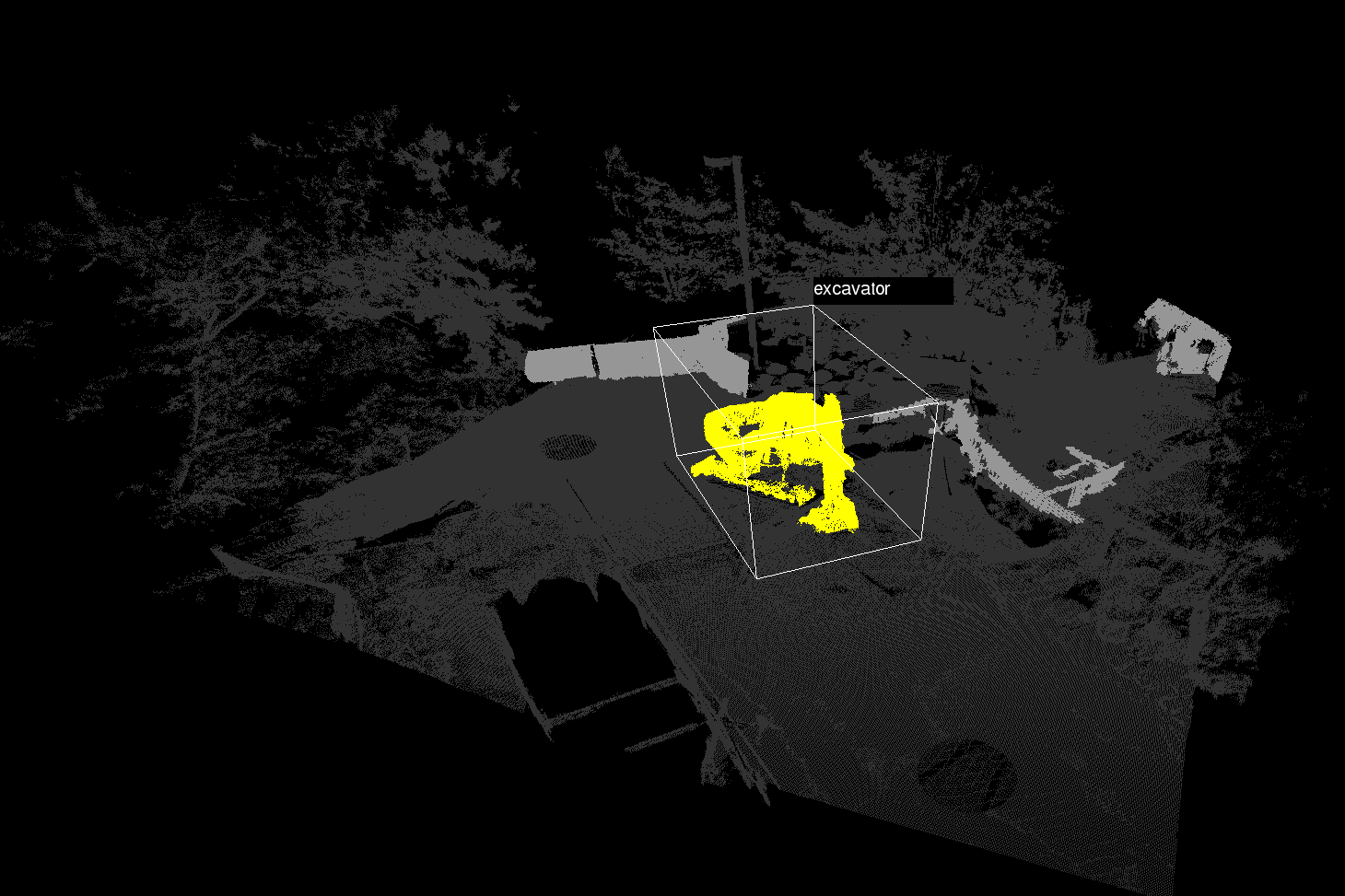
Heavy construction equipment operation requires processing of thousands of range data in real-time or near real-time about the surrounding work environment, which is difficult to achieve with the current sensor technologies. Material handling such as steel beam erection and bolting requires not only rapid visualization of workspace but highly accurate position data for safe and secure physical contact between a target object and an end-effector. To meet these challenges, a target-focused range data collection and modeling method has been developed through a hybrid approach which integrates a 3D laser scanner with other optical sensors. The hybrid system will significantly reduce data collection time while enhancing data accuracy as well as promoting a target feature extraction process from the background range data. Automatic target detection and fitting and matching algorithms have been developed for rapid model-based graphical registration for various shapes of construction equipment and materials. Properly engineered, this new hybrid method for rapid 3D graphical recognition and registration of objects will become an important component for developing more intelligent and automated construction job sites by providing a fully sensed, monitored environment for materials, equipment, and operator.
Automated Target Recognition & Registration
Safe construction and operation of heavy construction equipment such as cranes, excavators, concrete pump trucks has been considered a very important subject in construction field. It would be helpful for the operators if the accurate 3D position of the target objects and surroundings are readily available. It has been a challenging subject to recognize target objects from a scattered work environment because large and complex 3D site data obtained by a laser scanner makes it difficult to process itself in real or near real time. In this study, A target is automatically recognized and tracked through a video camera. To reduce data size and scanning time, only recognized target in a box (i.e., kernel) will be scanned. Our hybrid system consistes of a CCD camera and laser scanner were used to rapidly recognize and register dynamic target objects in a 3D space by separating target object’s point cloud data from other background point cloud data for quick process.
-
Wang, C and Cho, Y.( 2014). “Smart Scanning and Near Real-Time 3D Surface Modeling of Dynamic Construction Equipment from A Point Cloud.” Automation in Construction, Volume 49, Part B, January 2015, Pages 239-249, DOI: 10.1016/j.autcon.2014.06.003 (selected as best paper and invited from the 2013 30th International Symposium on Automation and Robotics in Construction (ISARC) in Montreal, Canada) [Fll text]
-
Cho, Y. and Gai. M. (2014). “Projection-Recognition-Projection Method for Automatic Object Recognition and Registration for Dynamic Heavy Equipment Operations.” a special issue of ASCE Journal of Computing in Civil Engineering, Volume 28, Issue 5, September 2014, (invited from 2012 ASCE International Workshop on Computing in Civil Engineering in Clearwater Beach, FL) DOI: 10.1061/(ASCE) CP.1943-5487.0000332 [Full text]
-
Cho, Y., Wang, C., Tang, P., and Haas, C.(2012). "Target-focused Local Workspace Modeling for Construction Automation Applications." ASCE Journal of Computing in Civil Engineering, Volume 26, Issue 5, September 2012, Pages 661-670, DOI: 10.1061/(ASCE)CP.1943-5487.0000166 [Fulltext]
-
Wang, C., Cho, Y., and Park, J. (2014). “Performance Tests for Automatic Geometric Data Registration Technique for Construction Progress Monitoring.” International Conference on Computing in Civil and Building Engineering (ICCCBE), ASCE, Jun. 23-25, Orlando, FL. pp. 1053-106, DOI: 10.1061/9780784413616.131 [Full text]
-
Cho, Y., Wang, C., Gai, M., and Park, J. (2014). “Rapid Dynamic Target Surface Modeling for Crane Operation Using Hybrid LADAR System” Construction Research Congress (CRC), ASCE, May 19-21, Atlanta, GA, DOI: 10.1061/9780784413517.108 [Full text]
-
Gai, M. and Cho, Y. (2013). “Automatic object recognition of dyanmic construction equipment from a 3D point cloud.” the 30th International Symposium on Automation and Robotics in Construction (ISARC), August 11-15, Montréal, Canada, DOI: 10.22260/ISARC2013/0061 [Full text]
-
Gai, M., Cho, Y., and Qinghua, X. (2013). “Real-time 3D visualization of multiple heavy construction equipment operations using LADAR.” Proceedings of the 2013 ASCE International Workshop on Computing in Civil Engineering, June 23-25, Univ. of Southern California, LA, California. pp.889-896, DOI: 10.1061/9780784413029.111 [Full text]
-
Gai, M., Cho, Y., and Qinghua, X. (2013). “Target-free automatic point clouds registration using 2D images.” Proceedings of the 2013 ASCE International Workshop on Computing in Civil Engineering, June 23-25, Univ. of Southern California, LA, California. pp.865-872, DOI: 10.1061/9780784413029.108 [Full text]
-
Gai, M., Cho, Y., and Wang, C. (2012). “Projection-Recognition-Projection (PRP) Method for Rapid Object Recognition from a 3D point cloud." Proceedings of the 2012 ASCE International Workshop on Computing in Civil Engineering, June 17-20, Clearwater, FL, pp. 325-332, DOI: 10.1061/9780784412343.0041 [Full text]

-
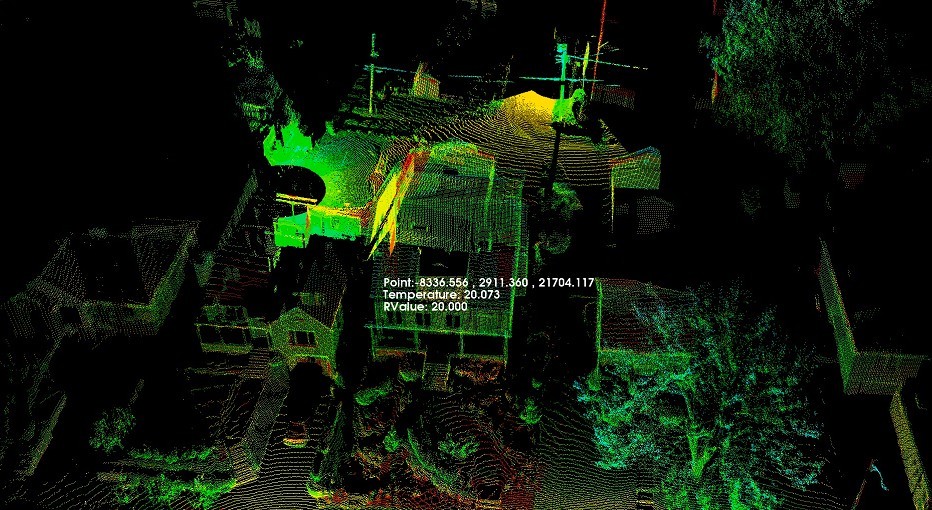
Zheng, K., Cho, Y., Wang, C., and Li, H. (2015)."A Non-invasive Residential Building Envelope R-value Measurement Method Based on Interfacial Thermal Resistance." ASCE Journal of Architectural Engineering, Volume 22, Issue 4, December 2016, DOI: 10.1061/(ASCE)AE.1943-5568.0000182, A4015002 [Full text]
-
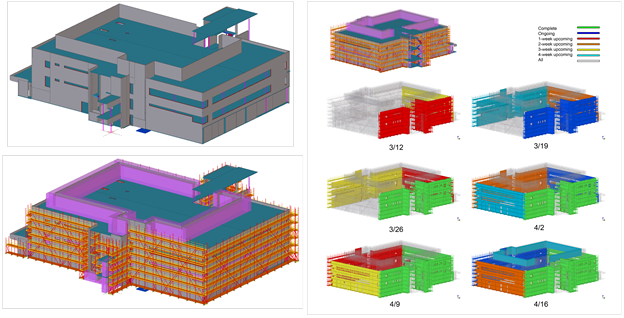
Wang, C., Cho, Y., and Kim, C. (2015). "Automatic BIM Component Extraction from Point Clouds of Existing Buildings for Sustainability Applications." Automation in Construction, Volume 56, August 2015, Pages 1-13, DOI: 10.1016/j.autcon.2015.04.001 [Full text]
-
Cho, Y., Ham, Y., and Golpavar-Fard, M. (2015). “3D As-is Building Energy Modeling and Diagnostics: A Review of the State-of-the-Art.” Journal of Advanced Engineering Informatics, Volume 29, Issue 2, April 2015, Pages 184-195, DOI: 10.1016/j.aei.2015.03.004 [Full text]
-
Sharp, S., Cho, Y., and Li, Haorong (2014). " Residential Energy Recovery Radiant Heated Slab System (ERRHSS) for Melting Snow." ASCE Journal of Architectural Engineering, Volume 21, Issue 1, March 2015, DOI: 10.1061/(ASCE)AE.1943-5568.0000165, 04014003 [Full text]
-
Wang, C., Cho, Y., and Gai, M. (2013). “As-is 3D Thermal Modeling for Existing Buildings using a Hybrid LIDAR System.” a special issue of ASCE Journal of Computing in Civil Engineering, Volume 27, Issue 6, November 2013, Pages 646-656 (invited from 2011 ASCE International Workshop on Computing in Civil Engineering in Miami, FL) DOI: 10.1061/(ASCE)CP.1943-5487.0000273 [Full text]
-
Cho, Y., Park, J., and Li, H. (2015). “A Framework for Cloud-based Energy Evaluation and Management for Sustainable Decision Support in the Built Environments”, 2015 International Conference on Sustainable Design, Engineering and Construction (ICSDEC). Chicago, May 10-13, 2015, DOI: 10.1016/j.proeng.2015.08.445 [Full text]
-
Zheng, K., Watt, J., and Cho, Y. (2015). “Building Central Plant System Performance Optimization through A Virtual Ambient Wet-bulb Temperature Sensor.” Proceedia Engineering, Vol 118. pp. 284-390, DOI: 10.1016/j.proeng.2015.08.438 [Full text]
-
Zheng, K., and Cho, Y. (2015). “A Convenient Thermal Performance Evaluating Method for Unitary AC (DX) Units.” Proceedia Engineering, Vol 118. pp. 391-403, DOI: 10.1016/j.proeng.2015.08.438 [Full text]
-
Wang, C. and Cho, Y. (2013). “Automated As-is BIM Extraction for Sustainable Simulation of Built Environments.” The Fifth International Conference on Construction Engineering and Project Management (ICCEPM-2013), Anaheim, CA, USA Jan. 9-11, 2013 [Link] [Full text]
-
Wang, C., and Cho, Y. (2012). “Automated 3D Building Envelope Recognition in Point Clouds.” ASCE, Proceedings of Construction Research Congress 2012, West Lafayette, IN, pp. 1155-1164, DOI: 10.1061/9780784412329.116 [Full text]
-
Im, H., Gai, M., Wang, C., and Cho, Y. (2012). “Hybrid Approach to Visualize Building Energy Information Model in Geospatial Application Programs.” ASCE, Proceedings of Construction Research Congress 2012, West Lafayette, IN, pp.1262-1270, DOI: 10.1061/9780784412329.127 [Full text]
-
Wang, C., Peng, Y., Cho, Y. and Li, H. (2011). “As-Built Residential Building Information Collection and Modeling Methods for Energy Analysis.” Proceedings of the 28th International Symposium on Automation and Robotics in Construction (ISARC), Seoul, Korea, June 29-July 2, pp.226-231. [Link] [Full text]
-
Cho, Y. and Wang, C. (2011). “3D Thermal Modeling for Existing Buildings Using Hybrid LIDAR System.” Proceedings of the 2011 ASCE International Workshop on Computing in Civil Engineering, Miami, DOI: 10.1061/41182(416)68 [Full text]
-
Wang, C., Cho, Y. (2011). “Non-invasive 3D Thermal Modeling for Buildings.” ASCE, International Conference on Sustainable Design and Construction in Kansas City, MO, DOI: 10.1061/41204(426)59 [Full text]
Journals:
- Kim, K., and Cho, Y. (2015)."Construction-Specific Spatial Information Reasoning in Building Information Models " Journal of Advanced Engineering Informatics, Volume 29, Issue 4, October 2015, Pages 1013-1027, DOI: 10.1016/j.aei.2015.08.004 [Full text]
- Kim, K., Walewski, J., and Cho, Y. (2015). “Multi-objective` Construction Schedule Optimization using Modified Niched Pareto Genetic Algorithm.” ASCE Journal of Management in Engineering, Volume 32, Issue 2, March 2016, DOI: 10.1061/(ASCE)ME.1943-5479.0000374 [Full tect]
Proceedings:
- Kim, K., Cho, Y., and Kwak, Y. (2016). "BIM-Based Optimization of Scaffolding Plans for Safety." Construction Research Congress 2016: pp. 2709-2718, DOI: 10.1061/9780784479827.270 [Full text]
- Kim, K., and Cho Y. (2015). “Automated Safety Planning of Scaffolding-Related Hazards in Building Information Modeling (BIM).” The 6th International Conference on Construction Engineering and Project Management (ICCEPM). Busan, Korea, Oct. 11-14, 2015, [Full text]
- Kim, K. and Cho, Y., (2015). "BIM-based Planning Of Temporary Structures For Construction Safety." 2015 ASCE International Workshop on Computing in Civil Engineering, June 21-23, Austin, TX, DOI: 10.1061/9780784479247.054 [Full text]